2.4 Control strategy characterisation
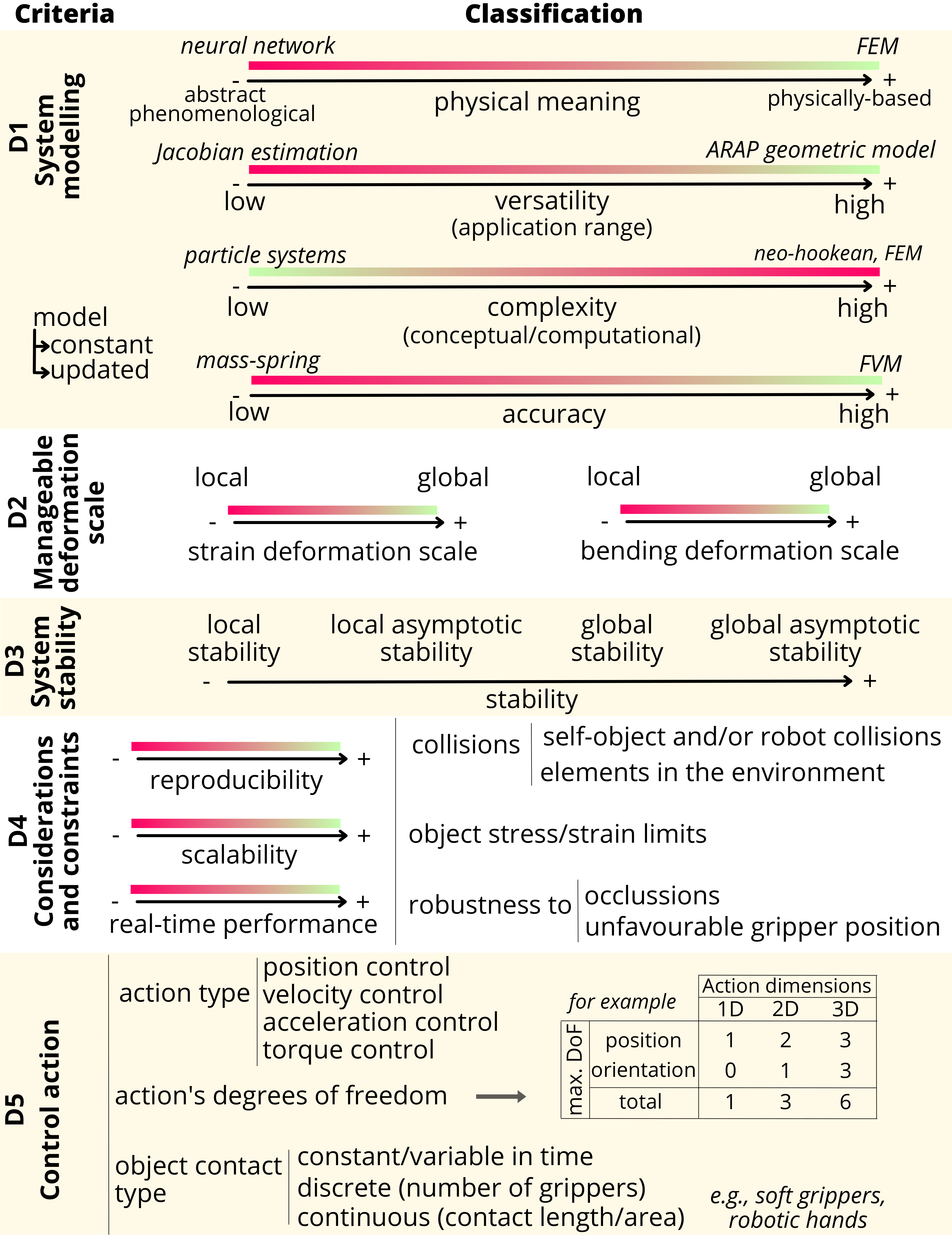
We propose classifying shape control strategies with respect to 5 criteria (Fig. 5 and Table 4): system modelling, manageable deformation scale, system's stability, considerations and constraints, and control action characteristics.
Table 4. Criteria from Sec. IID applied to several shape control approaches. Abbreviations and acronyms: def. (deformation), SfT (Shape from Template), ARAP (As-Rigid-As-Possible), LAS (local asymptotic stability), SGPFS (semiglobal practical finite time stable), GAS (global asymptotic stability), pos. (position), orient. (orientation) and disc. (discrete).
| Method | D1 System modelling | D2 def. scale | D3 System stability | D4 Consider. and constr. | D5 Control actions (and object contact type) |
|---|---|---|---|---|---|
| (Aranda et al., 2020) | Geometric (SfT) | Global | - | Robust to occlusions | 3D position, small contact region, few grippers |
| (Shetab-Bushehri et al., 2022) | ARAP Jacobian | Global | LAS | - | 3D pos. and orient. (6 DoF), medium-sized contact |
| (Qi et al., 2022) | Deformation Jacobian for sliding control | Global | SGPFS | - | 3D velocity, small contact region |
| (Cui et al., 2020) | Deformation Jacobian | Global | - | Collisions, strain avoidance | 3D position, disc. contact, dual arm manip. |
| (J. Zhu et al., 2021) | Local interaction matrix (online updated) | Global | LAS | - | 3D position, disc. contact, single arm robot |
| (A. Cherubini et al., 2020) | Deep neural network | Local | - | - | 3D position, small contact region, special tool |
| (López-Nicolás et al., 2020) | Consensus-based model | Global | GAS | Smooth deformation | 2D position, disc. contact, few grippers |
| (Hu et al., 2019) | Deep neural network | Global | - | Robust to occlusions | 3D velocity, disc. contact, few grippers |
| (Cuiral-Zueco and López-Nicolás, 2021) | Quadratic mesh deformation energy | Global | LAS | - | 3D velocity, disc. contact, few grippers |
| (Cuiral-Zueco et al., 2023) | Curvature-based Energy Jacobian | Global | LAS | Seeks low deformations | 2D trans. + 1D orient., disc. contact, few grippers |
| (Cuiral-Zueco and López-Nicolás, 2024) | Procrustes-like multi-scale rigidity | Global | LAS | - | 3D pos. and orient (6 DoF), small/medium contact region |
| (Caporali et al., 2024) | Serial chain (axial springs) | Global | - | - | Disc. contact, variable gripper configuration, one gripper |
| (Deng et al., 2024) | Hyper-FE (Finite Element) | Global | - | Collisions, strain energy | 3D pos., disc. contact, few grippers. |
2.4.1 System modelling
In the literature, the term model is used from two perspectives: mechanical and control engineering. The former refers to simulation models as low-abstraction (constitutive) models describing the system's physical behaviour (e.g., physics-based models (Yin et al., 2021) and dynamic representations (Arriola-Rios et al., 2020)). The latter, more control-oriented, includes abstract models (e.g., data-driven Jacobian matrices or neural networks) for defining control laws. In the context of shape control, we propose merging both perspectives and classifying the object's model based on their physical meaning (criterion D1 in Fig. 5). Physically-based models facilitate the consideration of other deformation aspects besides shape, e.g. stress constraints. On the other hand, they usually require complex computations than abstract or phenomenological models. In this criterion we also consider the model's versatility, i.e., whether, once computed, the model works in multiple scenarios or it is tailored to specific objects, materials, or deformation types. We also incorporate the complexity (both conceptual and computational) and accuracy criteria as quantifiable characteristics that facilitate the comparison of models.
2.4.2 Manageable deformation scale
this criterion involves the scale of the deformations that can be managed by the control strategy (criterion D2 in Fig. 5). Regarding both types of deformations (strain and bending) a control strategy may be able to handle local and/or global deformations. Approaches that properly handles severe bending processes (global bending deformations, as in origami) might not be suitable for large stretching processes (global strain deformations, as in dough manipulation).
2.4.3 System stability
Closed-loop system stability analysis has general relevance in control engineering, but given the non-linearity and the sub-actuation of deformable objects, it is of particular importance in the problem of shape control (criterion D3 in Fig. 5). Likewise, controllability and reachability are included in this criterion.
2.4.4 Considerations and constraints
Criterion D4 in Fig. 5 focuses on considerations and constraints that are relevant regarding the feasibility and effectiveness of the shape control strategy. This encompasses reproducibility, highlighting the ease with which a method, such as an online updated Jacobian-based strategy, can be reproduced compared to, e.g., more data-intensive neural network approaches. Scalability, which assesses whether the strategy remains effective with variations in object size or number of actuators, is also relevant. Real-time performance, or the ability of the system to maintain the required closed-loop frequencies, is essential for dynamic control tasks. Practical constraints include collision avoidance or object strain limits.
2.4.5 Control action
The last criteria are related to the output of the control block, i.e. the control actions (criterion D5 in Fig. 5). Within this classification we distinguish between the action type, the action dimensions and DoF (Degrees of Freedom), and the object contact type. Another important aspect is the action's dimensions and DoF (both regarding position and orientation), closely related to the type of stress the grippers can transmit to the object (e.g. torsional stress transmitted to the object can only be directly controlled if the gripper has rotation DoF). We distinguish between constant and variable grasping, depending on whether the gripper grasping positions on the object remain constant or change over time. We propose classifying the gripper contact type into discrete contact points (an approximation for objects with a large size compared to those of the gripper's) or continuous contact (contact lengths or areas, used when the gripper's size cannot be neglected or when continuous contact is regarded in the control strategy, e.g., manipulation with soft grippers). Contact position and type has a direct impact on how actions are transmitted to the deformable object (e.g. a single contact point does not allow for proper transmission of gripper rotations).