2.2 Available object information classification
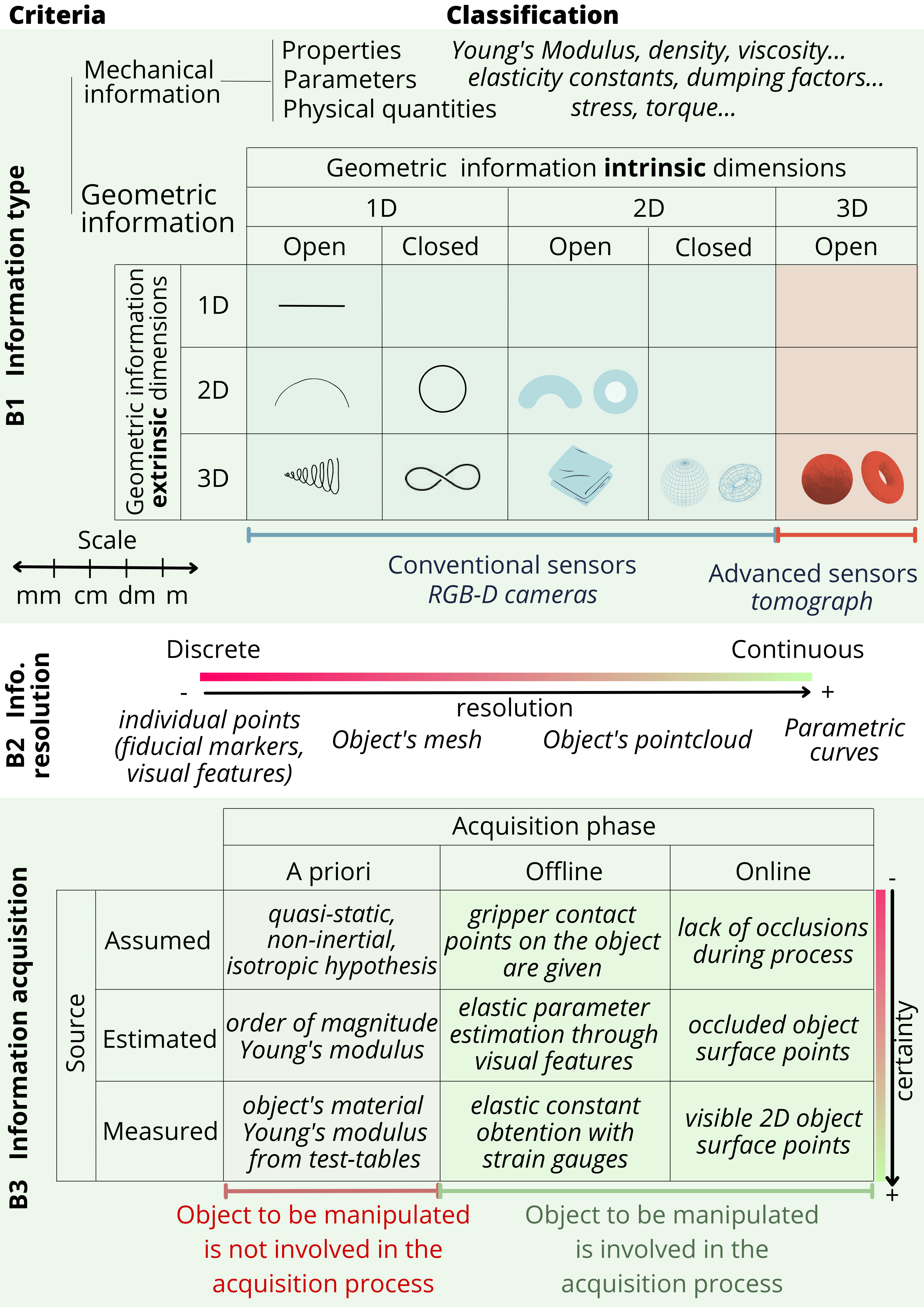
Table 2. Criteria in Sec. IIB applied to several shape control approaches. Abbreviations: geom. (geometry), surf. (surface), physic. (physical), param. (parameter), def. (deformation), estim. (estimated), meas. (measured) and assumpt. (assumption).
| Method | B1 Information type | B2 Information resolution | B3 Information acquisition |
|---|---|---|---|
| (Aranda et al., 2020) | Geom.: 2D open surf. embedded in 3D | Medium (discrete 3D mesh) | Estim. online, visual featuers with RGB camera. |
| (Shetab-Bushehri et al., 2022) | Geom.: 2D open surf. embedded in 3D | Medium (discrete 3D mesh) | Estim. online, visual featuers with RGB camera. |
| (Qi et al., 2022) | Geom.: 2D open surf. embedded in 3D | High (1D closed contour) | Meas. online with monocular RGB camera |
| (Cui et al., 2020) | Geom.: 2D open surf. embedded in 3D | Low (few discrete 3D marker points) | - |
| (J. Zhu et al., 2021) | Geom.: 2D open surf. embedded in 3D | High (1D open/closed contour) | Meas. online with RGBD camera. |
| (A. Cherubini et al., 2020) | Geom.: 3D volume | High (3D point cloud) | Meas. online with RGB-D camera. |
| (López-Nicolás et al., 2020) | Geom.: 2D open surf. embedded in 2D | High (1D closed contour) | - |
| (Hu et al., 2019) | Geom.: 3D volume | High (3D point cloud) | Meas. online with RGBD camera. |
| (Cuiral-Zueco and López-Nicolás, 2021) | Geom.: 2D open surf. embedded in 3D | High (3D point cloud) | Meas. online with RGBD camera. Isotropy assumpt. |
| (Cuiral-Zueco et al., 2023) | Geom.: 2D open surf. embedded in 3D | High (1D closed contour) | Meas. online with RGB camera |
| (Cuiral-Zueco and López-Nicolás, 2024) | Geom.: 2D open or closed surf. embedded in 3D | High (3D point cloud) | Meas. online with RGBD camera. Isotropy assumpt. |
| (Caporali et al., 2024) | Geom.: 1D open embedded in 3D; Physic.: def. param. | High (3D point cloud) | Geom.: Meas. online, 3D scanner; Physic.: estim. online |
| (Deng et al., 2024) | Geom.: 3D volumetric (dense) | Medium (3D tetrahedral mesh) | Mesh estim. online from few laser-reflective markers |
In this section we classify the available object information with respect to three criteria: information type, information resolution and information acquisition (see Fig. 3 and Table 2). We do not centre this analysis on the available sensor types as the same type of information can be acquired with different sensors. Rather, we focus on the elements that constitute the available information for the analysis of the object's behaviour (Sec. 2.1) and the definition of the shape error (Sec. 2.3).
2.2.1 Information type
we define the mechanical information and the geometric information groups (criterion B1 in Fig. 3). A shape control system might make use of information about mechanical properties (e.g. density), deformation parameters (e.g. mesh elasticity constants) and physical quantities (e.g. torque values). Similarly to the object's classification in section 2.1, we classify the available geometric information regarding its intrinsic and extrinsic dimensions. However, the information's dimensionality should not be confused with the real object's dimensionality and both should be properly specified. This distinction is relevant as the available geometric information has an important impact on the control strategy and the definition of error metrics. For example, a 2D object that constitutes a closed manifold embedded in 3D (e.g. an inflated balloon) being perceived with just one RGB-D camera. In this case, the camera provides a 2D open surface (partially perceived balloon surface) embedded in 3D. The object's scale information is also taken into account in this classification as it may not be available in some cases (e.g. when using a monocular camera with no scale-related visual references).
2.2.2 Information resolution
We propose a characterisation (criterion B2 in Fig. 3) ranging from discrete (e.g. torque values on grasped points) to higher resolution information (e.g. point clouds) and continuous forms such as parametric curves. This resolution criterion can also be applied to the information's frequency/latency, which becomes particularly relevant when inertial behaviours cannot be neglected.
2.2.3 Information acquisition
We divide the information acquisition process (criterion B3 in Fig. 3) into two correlated criteria: the information source and the information acquisition phase. We propose classifying information sources according to their certainty into assumed (e.g. assumption of quasi-static or non-inertial object behaviour), estimated (e.g. visually obtained elastic parameters) and measured (e.g. object surface points obtained with LiDAR sensor). On the other hand, information can be acquired at different stages over time. In the acquisition phase, we differentiate between information obtained a priori (where the object to be manipulated is not involved in the acquisition process), offline (where the object is involved, but acquisition occurs before control begins), and online (where information is obtained from the object during the shape control process). A shape control system may incorporate a combination of the described types of information sources and acquisition phases. Clearly specifying both the information source and acquisition phase is required for accurately characterising a shape control method.