This work was supported via project REMAIN - S1/1.1/E0111 (Interreg Sudoe Programme, ERDF), and via projects PID2021-124137OB-I00 and TED2021-130224B-I00 funded by MCIN/AEI/10.13039/501100011033, by ERDF A way of making Europe and by the European Union NextGenerationEU/PRTR.
3 Definition of Chained Team Structure
In various multiagent tasks, it is beneficial for the agents' interactions to form a chain; e.g., when specific agent vicinities are to be kept, such as in cooperative transport or target enclosing. Here, we propose grouping the agents in chained sets. Consecutive sets along the chain are interlaced, i.e., there are several agents in the intersection set of every two consecutive sets. We choose the number of agents in these intersection sets to be equal to the number of columns of \(C\): \(D\cdot L+1\). This way, the agent positions in each intersection provide the same number (\(D\cdot( D\cdot L+1)\)) of degrees of freedom as the parameter vector \(v\); and, therefore, the positions of intersection agents can uniquely determine \(v\),
allowing us to obtain formation convergence guarantees.
Then, we choose the number of agents per set, which we call \(M\), to be one more than the number of agents in the intersections. Therefore, we have \(M=D\cdot L+2\). We choose all sets to have the same number of agents, and to form a chain that may be open or closed. For an open chain, we define \(N-M+1\) chained sets of agents as follows:
\[\begin{aligned}\tag{5}
\mathcal{S}_1\hspace{-2pt}=\hspace{-2pt}\{1, \ldots, M\}, \ldots,\hspace{1pt}
\mathcal{S}_{N\hspace{-1pt}-\hspace{-1pt}M+1}\hspace{-2pt}=\hspace{-2pt}\{N\hspace{-2pt}-\hspace{-2pt}M\hspace{-2pt}+\hspace{-2pt}1, \ldots, N\}.
\end{aligned}\]
On the other hand, for a closed chain we define the \(N\) sets
\[\begin{aligned}\tag{6}
\mathcal{S}_1=\{1, \ldots, M\}, \ldots, \hspace{1pt}
\mathcal{S}_N=\{N, \ldots, N+M-1\}.
\end{aligned}\]
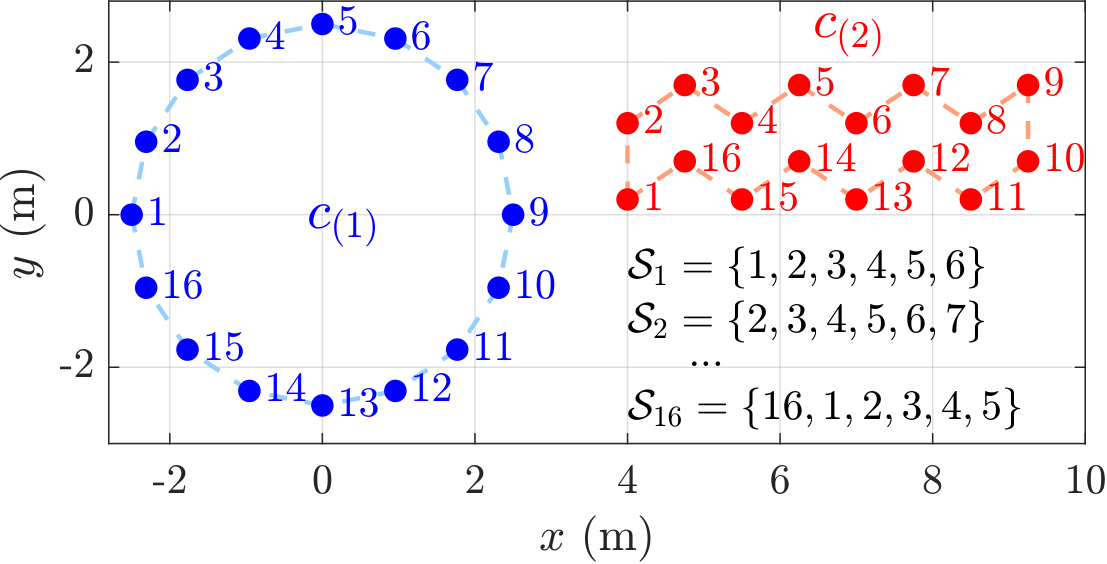
Fig. 1 shows an illustrative example. Let \(N_s\) denote the number of chained sets, i.e., \(N_s=N-M+1\) for an open chain, and \(N_s=N\) for a closed chain, and let us define \(\mathcal{N}_s=\{1,2,\ldots,N_s\}\). For readability, we will use \(j\) as the index for sets in \(\mathcal{N}_s\). Our choice of using pre-defined sets \(\mathcal{S}_{j}\) which all have the minimum possible cardinality is made for the sake of sparsity and uniformity, Still, note that other designs would be possible. To define the proposed structure based on multiple chained sets, the number of agents, \(N\), must satisfy \(N > M\). Note that \(N\) can be arbitrarily large.
Figure 1. Example with two nominal configurations \(c_{(1)}\) and \(c_{(2)}\) in two dimensions (i.e., \(M=6\)) for a team of \(N=16\) agents. The positions (circles), agent indices, and sets \(\mathcal{S}_{j}\) for a closed chain are depicted.
Next, we define several matrices used in our control formulation. We first define for every set \(\mathcal{S}_{j}\), i.e., \(\forall j \in \mathcal{N}_s\),
\[\begin{aligned}\tag{7}
C_{j} =\begin{bmatrix} row_{j}(C) \\ row_{j+1}(C) \\ \vdots \\ row_{j+M-1}(C)
\end{bmatrix} \in \mathbb{R}^{M \times (M-1)},
\end{aligned}\]
\[\tag{8}
\overline{C}_{j} = C_{j} \otimes I_D \hspace{3pt} \in \mathbb{R}^{(D\cdot M) \times (D \cdot(M-1))}.
\]
These constant matrices collect the part of the nominal configurations including the \(M\) agents in \(\mathcal{S}_{j}\). We also define
\[
\hspace{-5pt}G_{j} \hspace{-1pt}= \begin{bmatrix} row_{j}(C) \\ row_{j+1}(C) \\ \vdots \\ row_{j+M-2}(C)
\end{bmatrix} \in \mathbb{R}^{(M-1) \times (M-1)} \hspace{10pt}\forall {j} \in \mathcal{N}_s.
\]
A useful property, due to the chained structure, is that if \(\mathcal{S}_{{j}-1}\) and \(\mathcal{S}_{{j}}\) are consecutive sets in the chain, then
\[\tag{9}
\hspace{-3pt}\overline{C}_{j} \hspace{-2pt}= \hspace{-3pt}\begin{bmatrix}
G_{j} \otimes I_D \\ row_M(C_{j}) \otimes I_D
\end{bmatrix} \hspace{-3pt}, \hspace{2pt} \overline{C}_{{j}-1} \hspace{-2pt}= \hspace{-3pt} \begin{bmatrix}row_1(C_{{j}-1}) \otimes I_D \\
G_{j} \otimes I_D
\end{bmatrix}\hspace{-2pt}.
\]
Next, we make an assumption about these matrices.
Assumption 1.
\(G_{j}\) is nonsingular \(\forall {j} \in \mathcal{N}_s\).
Assumption 1 is not satisfied if the geometry of the nominal configurations makes some \(G_{j}\) singular. For example, this can happen when these configurations include several collinear points. This letter focuses on the nonsingular cases.